
專屬客服號

微信訂閱號
全面提升數據價值
賦能業務提質增效
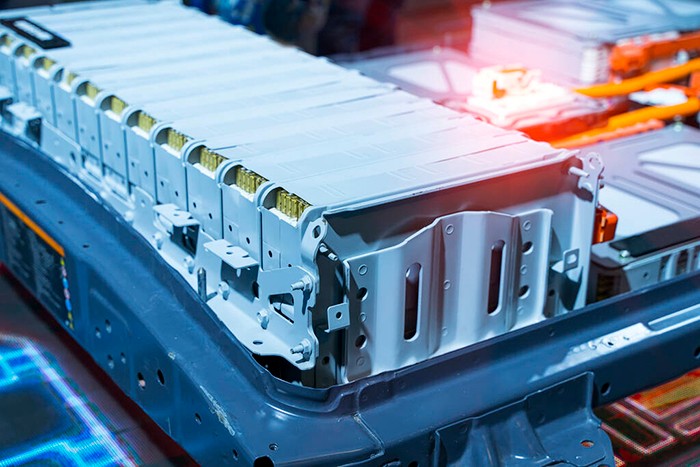
視覺技術的發展加快,現在已經被充分應用于汽車行業的運動估計范疇。而隨著無人駕駛車的出現,這項技術也會有新的發揮平臺。

里程計的概念
在里程計問題中,我們希望測量一個運動物體的軌跡。這可以通過許多不同的手段來實現。例如,我們在汽車輪胎上安裝計數碼盤,就可以得到輪胎轉動的距離,從而得到汽車的估計。或者,也可以測量汽車的速度、加速度,通過時間積分來計算它的位移。完成這種運動估計的裝置(包括硬件和算法)叫做里程計(Odometry)。
里程計的特性
里程計一個很重要的特性,是它只關心局部時間上的運動,多數時候是指兩個時刻間的運動。當我們以某種間隔對時間進行采樣時,就可估計運動物體在各時間間隔之內的運動。由于這個估計受噪聲影響,先前時刻的估計誤差,會累加到后面時間的運動之上,這種現象稱為漂移(Drift)。
視覺里程計的概念
視覺里程計VO的目標是根據拍攝的圖像估計相機的運動。它的主要方式分為特征點法和直接方法。其中,特征點方法目前占據主流,能夠在噪聲較大、相機運動較快時工作,但地圖則是稀疏特征點;直接方法不需要提特征,能夠建立稠密地圖,但存在著計算量大、魯棒性不好的缺陷。
視覺里程計的基本原理
視覺里程計利用車載攝像機采集到的圖像信息恢復車體本身的六自由度運動,包括三自由度的旋轉和三自由度的平移。由于類似于里程計的航跡推算.這種基于圖像信息的自運動估計方法被稱為視覺里程計技術。視覺里程計的基本步驟包括特征提取、特征匹配、坐標變換和運動估計。當前大多數視覺里程計系統仍是基于此框架。與視覺里程計技術聯系非常緊密的兩個研究領域是形狀信息運動復原(StructurefromMotion,SFM)算法和SLAM算法。在視覺SLAM問題中,需要同步實時估計攝像機本身的位置以及所檢測的路標的空間位置及其關聯,從而對其所處的環境進行地圖創建。早期的SLAM算法需要依靠那些能夠獲得深度信息的傳感器,如激光雷達、聲吶等;而近年來單純依靠機器視覺的V-SLAM開始得到關注,如單目視覺SLAM算法。其計算機制在本質上與基于非線性濾波器的視覺里程計系統非常相似。
SFM算法,也就是從二維圖像數據中恢復三維場景結構以及攝像機本身的六自由度運動的方法。在這里,攝像機提供的觀測量都是特征位置在攝像機坐標系下的二維投影。在經典的視覺SLAM的術語中,可以說SFM的設備只提供了方位而沒有范圍。對于兩幀視覺里程計,有研究者將其稱為基于SFM技術的視覺里程計,可以視為不需要估計場景結構的SFM算法,或者簡化了的SFM算法。所以,此類視覺里程計算法的核心模塊大多來自經典SFM算法。
純視覺系統與混合系統
根據前文定義,僅僅依靠視覺信息輸入的里程計系統被稱為純視覺系統。這里提到的絕大部分算法都屬于純視覺系統,但是對于增量式的兩幀視覺里程汁的累積誤差,除了光束法平差,也可以采用能提供全局定位信息的全球定位系統(GPS),或能夠提供短期精度高的高頻數據的慣性導航元件(IMU)等來改進系統性能。這種依靠其他傳感器來輔助視覺進行定位導航的系統被稱為混合系統。它們大都是基于非線性濾波器,如EKF,UKF等的數據融合機制。其中,又以攝像機-IMU的融合系統應用最為廣泛。然而引人附加傳感器的做法可能會帶來新的問題,如多傳感器間位置關系的精確標定,正確的數據融合等,仍需要進一步研究。
視覺里程對計算機視覺的應用,能夠對無人駕駛車進行自主定位,車載視覺里程計也可以用作檢測前方目標,對車的行駛方向進行決策。
本文由五度數科整理,轉載請標明出處,違者必究!
客戶服務熱線:
周一至周五(09:00 - 18:00)

專屬客服號

微信訂閱號
Copyright ? 北京篤威爾數字技術有限公司 | 五度易鏈 京ICP備2021019355號-2 京公網安備11010602103306
公司地址:北京市豐臺區廣安路9號國投財富廣場1號樓12層 聯系電話:010-68321050
Copyright ? 北京篤威爾數字技術有限公司 | 五度易鏈 京ICP備2021019355號-2 京公網安備11010602103306
公司地址:北京市豐臺區廣安路9號國投財富廣場1號樓12層 聯系電話:010-68321050
請完善以下信息,我們的顧問會在1個工作日內與您聯系,為您安排產品定制服務





評論